“숲은 아름답고, 어두우며 깊다. 하지만 나는 지켜야 할 약속이 있고, 이 로봇을 따돌리기 전에 가야 할 길이 멀다.”
미국의 한 인터넷언론은 최근 이 로봇을 소개하면서 이렇게 멋들어진 문장을 구사했다. 20세기 미국의 대표적 시인이라 할 로버트 프로스트(Robert Frost)의 시 <눈 오는 저녁 숲가에 서서>의 한 구절을 빌려 표현한 것이다. ‘아틀라스’(Atlas)라는 이름의 이 로봇은 울퉁불퉁한 숲길을 걷는 능력을 보여준다. 산책을 하는 목가적인 로봇이 연상될지도 모르겠다. 하지만 천만의 말씀이다. 이 로봇은 목적지를 향해, 아니면 누군가를 뒤쫓거나 찾기 위해 부지런히 숲길을 휘젓고 다니는 중이다. 군사용을 염두에 둔 로봇이라는 얘기다. 지난 6월 끝난 미 고등방위연구계획국(DAPA) 주최 재난구조로봇 경연대회에서, 6개의 참가팀이 자신들의 소프트웨어를 장착할 로봇으로 선택한 로봇이기도 하다. 2013년 말 구글이 인수한 로봇 전문업체 보스턴 다이내믹스(Boston Dynamics)의 작품이다.
회사 창업자인 MIT 교수 출신의 마크 레이버트(Marc Raibert) 박사는 이달 초 미국 보스턴에서 열린 한 제11회 국제팹랩회의(FAB11)에서 이 로봇의 ‘숲길 걷기’ 영상을 처음 공개했다. 헌데 동영상을 보면 눈에 거슬리는 장치가 하나 있다. 키 180㎝, 몸무게 150㎏ 가량의 건장한 이 휴머노이드 로봇 등 뒤에 매달린 케이블이다. 로봇에 동력을 공급해주는 장치이다. 레이버트 박사는 와의 인터뷰에서 “이 비디오는 1년 전에 촬영한 것으로 이전 버전이다. 최신 아틀라스 버전은 동력 케이블 없이, 등에 배터리를 짊어지고 움직인다”고 설명했다. 이 영상이 특별한 것은 실제 울퉁불퉁한 자연 지형을 두 발로 다닌다는 점이다. 그동안 등장한 2족형 로봇들은 대개 인공 장애물을 넘거나 피하는 모습을 보여줬다.
보스턴 다이내믹스의 대표적 네발 로봇 ‘빅 독’. 보스턴 다이내믹스
아틀라스는 이 회사의 대표적인 네발 로봇 ‘빅 독’(Big Dog)에 못잖은 걷기와 균형 능력을 보여준다. 걸으면서 몸의 균형을 잡는 건 네 발 로봇에게는 그리 어려운 게 아니지만, 두발 로봇에겐 그 몇배나 힘든 일이다. 레이버트는 팹11에서 가진 프리젠테이션에서 “야외에서 이를 구현하는 건 실험실에서와는 완전히 다른 도전이었다”라고 말했다. 보스턴 다이내믹스는 구글이 인수한 10여개의 로봇업체 가운데 하나로, 주로 네 발 로봇과 두 발 로봇에 주력해 이 분야에서 뚜렷한 성과를 보여주고 있다. 레이버트는 “우리가 할 수 있는 모든 것을 로봇이 할 수 있다고 말하는 건 아니다. 하지만 계속해서 밀어붙인다면 거기까지 도달할 것이다.”라고 말한다.
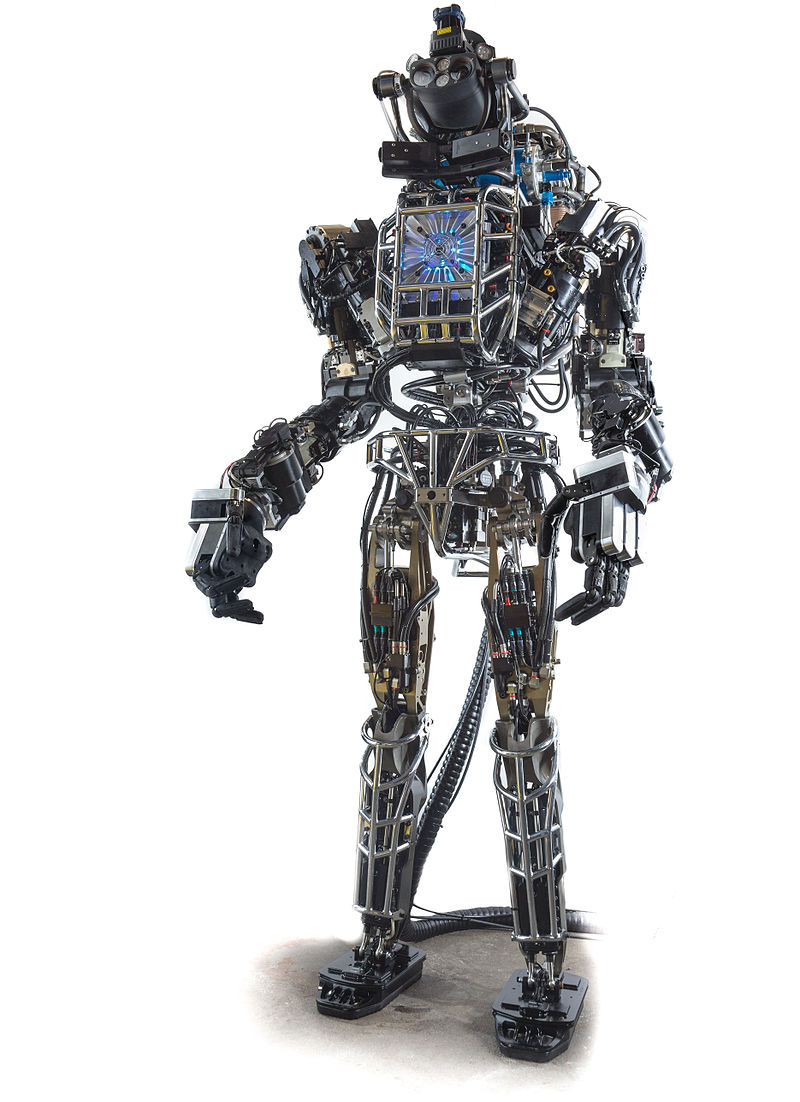
아틀라스의 초기 버전. 보스턴 다이내믹스
사람들은 이 로봇을 보고 어떤 느낌이 들까? 이번 회의에서 레이버트는 이 부분에 대해 명확한 언급을 하지는 않았다. 하지만 그는 2010년 영국의 인터넷언론 <엔지니어>와의 인터뷰에서 이렇게 말했다고 한다.
“유튜브에서 ‘빅 독’ 비디오를 본 사람들 중 3분의 1은 무섭다고 했다. 이들은 로봇이 그들을 향해 오고 있다고 생각한다. 그러나 우리는 인간과 동물들이 움직이는 것에 가깝게 구현할 수 있다는 데 자부심을 느낀다. 로봇이 마치 살아있는 것처럼.”
여러분은 어떤 느낌이 드는가? 곽노필 기자 nopil@hani.co.k ▶곽노필의 미래창 http://plug.hani.co.kr/futures


){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}


기사공유하기